Hardware
Snaptics Hardware Overview
The Snaptics platform relies on a set of modules to create wearable bracelet haptic devices for users. While you are free to mix and match the modules that will be best suited for your project we have a few recommendations to get the most out of your Snaptics project:
- Assemble one control and power module for each bracelet that will require independent control.
- Wires will go from the control module to the actuation modules so try to keep them close
- The skin can get desensitized from too much haptic actuation in a localized space so consider using blank modules to space out your actuation
Actuation Modules
| Module Name | Description | Downloads |
|---|---|---|
Stretch Module 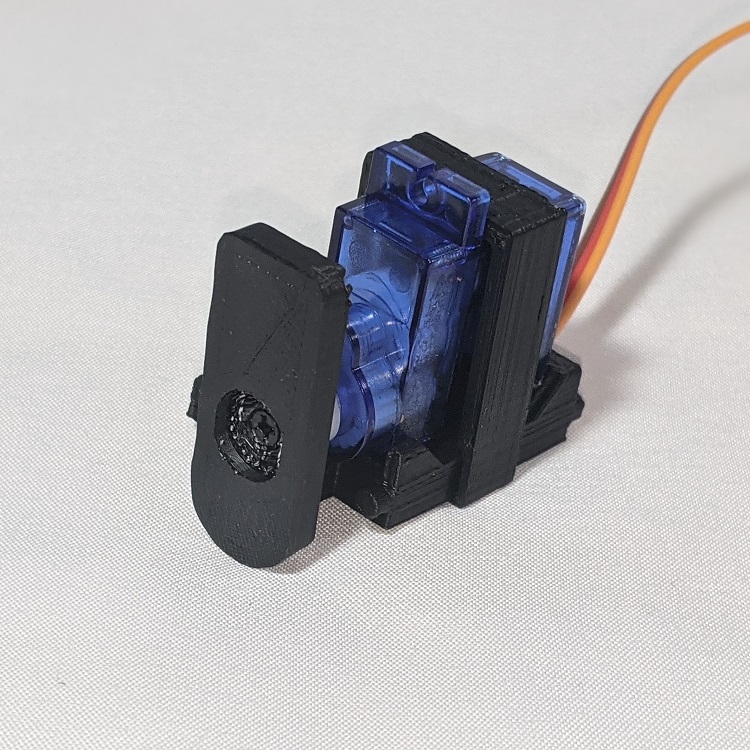 |
The stretch module delivers a tangential skin stretch using a servo motor actuating tangentially to the skin.The stretch module is composed of four parts: the clip, the tactor, the actuator, and the base. The twist and stretch modules feature SG90 micro servo motors commonly used in hobbyist applications as the main actuators. More information. | 3D Model Download Solidworks CAD Download |
Twist Module 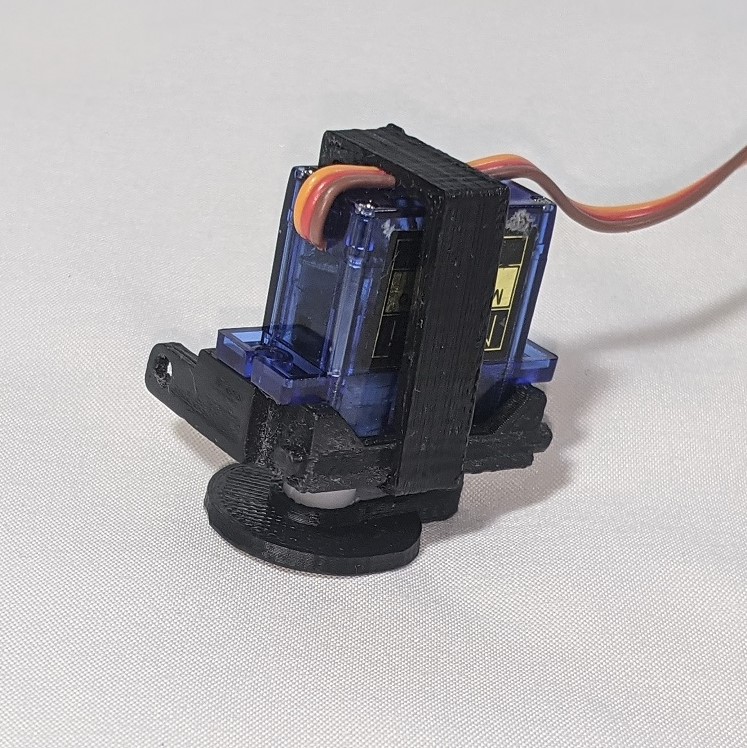 |
The twist module delivers a tangential skin twist using a servo motor actuating normal to the surface of the skin. The twist module is composed of four parts: the clip, the tactor, the actuator, and the base. The twist and stretch modules feature SG90 micro servo motors commonly used in hobbyist applications as the main actuators. More information. | 3D Model Download Solidworks CAD Download |
ERM Vibration Module 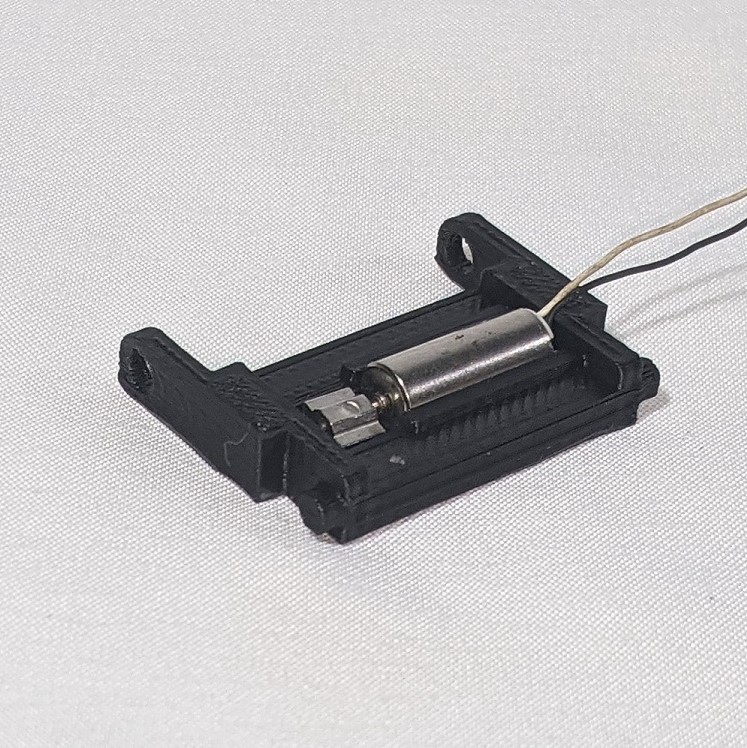 |
The ERM vibration module with its base components. The cylindrical eccentric rotating mass motor is secured to the 3d printed module frame with a light press fit. The vibration of the ERM motor is transmitted to the skin via the contact surface of the module frame. The ERM vibration module is composed of three parts: the actuator, the base, and the clip. More information. | 3D Model Download Solidworks CAD Download |
Electronics Modules
| Module Name | Description | Downloads |
|---|---|---|
Control Module 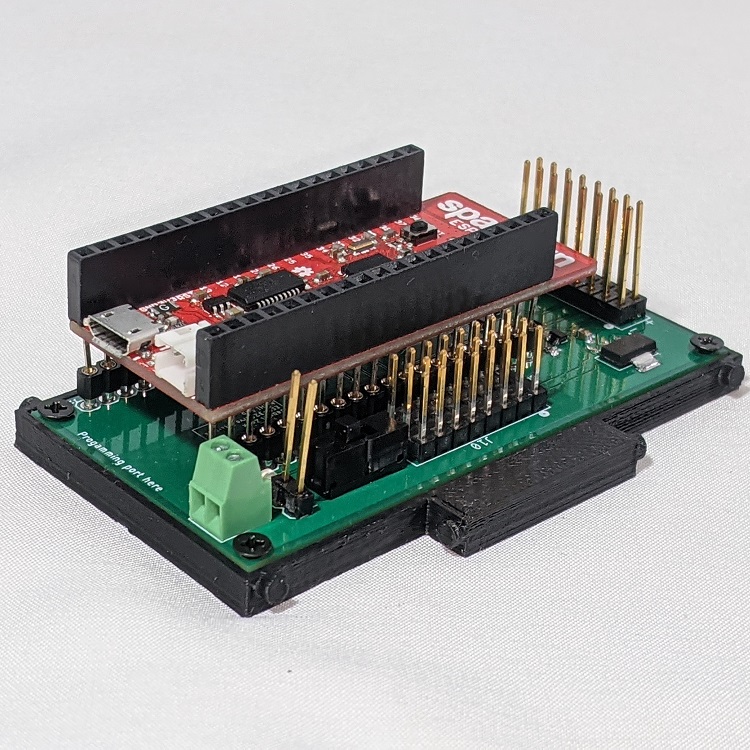 |
The control module houses the main control circuitry. The current version of the board features a frame, a custom-made printed circuit board, and a Sparkfun ESP32 Development Board. The frame uses a x-lattice structure to stabilize the base of the unit while minimizing material costs. Rather than having the ESP32 control board interface directly with the actuators, it connects to female header pins on the PCB. This PCB features a plug for an external power supply, male header pins to connect actuators to, a 5V regulator, and low-side MOSFET control for the ERM motors. The board has eight servo and ERM ports. More information. | 3D Model Download Solidworks CAD Download |
Power Module 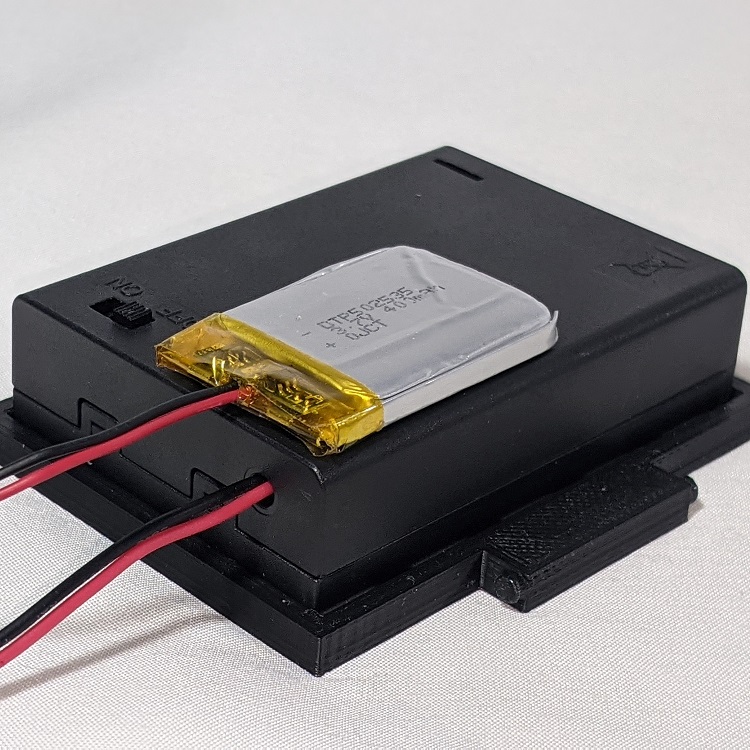 |
The power module features a frame that provides support for the two power sources used in this device, one battery pack for motor support and a smaller lithium ion battery pack for electronics support. More information. | 3D Model Download Solidworks CAD Download |
Support Modules
| Module Name | Description | Downloads |
|---|---|---|
Blank Module  |
The blank module is a simple rectangular frame of out dimensions with a x-lattice support in the frame to provide stability. The blank module includes the same chain lock and key mechanisms on either side to interface with any other module in order to give the designer freedom to space out modules on their desired device by adding or removing blank modules between actuation modules. More information. | 3D Model Download Solidworks CAD Download |
Terminal Modules 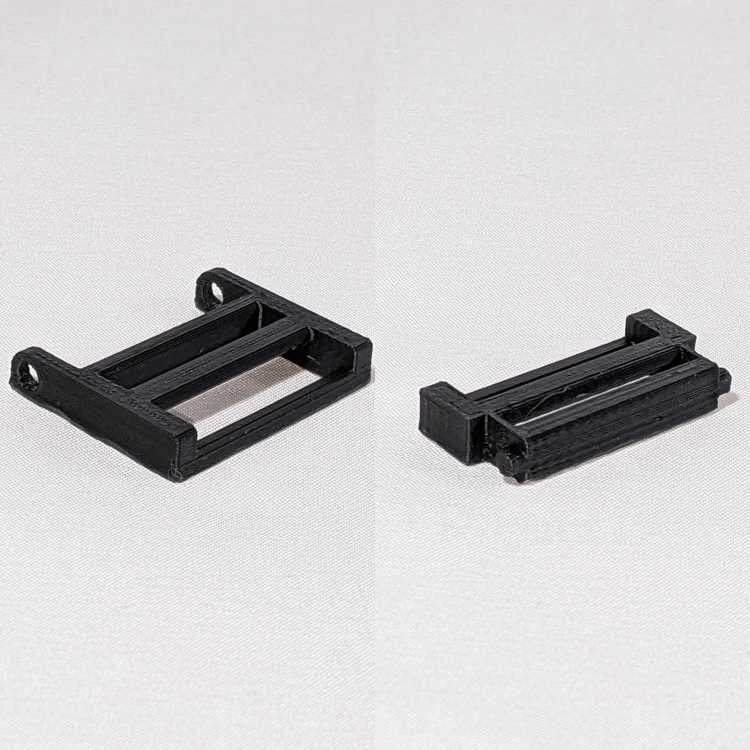 |
The terminal modules are converter pieces between the snap connections of the other modules to an interface that can be coupled with a simple strap or with 25mm webbing. The terminal modules are adjustable and allow webbing or strapping to be tightened or loosened after attachment. More information | 3D Model Download Solidworks CAD Download |